Having followed the supplied instructions there was
a slight problem with the actuator wire for the signal arm
catching against the fine moulding on the underside of the cap at
the top of the pole. This would sometimes cause the actuator wire
to bow outwards if the operating lever was kept moving. Two
things were done to alleviate this: First the wire was bent at
about 45 degrees rather than 90 as per the instructions; Second
the fine moulding lines were scrapped flat (the casting being
soft whitemetal this was quite easy to do).
Almost all the operating levers in the base had a
problem with the lug through which the actuator wire passed
catching on the inside of the tube fitted over the base (not show
here). This was resolved by lightly sanding the lug to as small
as was felt safe and using a round file to make a corresponding
groove on the inside of the tube. Be very careful because the
plastic from which the lug is made is very soft so only make a
few strokes with the sandpaper at a time and keep checking how
things are progressing.
Some of the operating levers had too much lateral
free play such that they would slip over the built in stop. This
would cause the arm to be raised to high. This was solved simply
by sticking a little more plastic on so as to make this stop
wider.
Using the built in stop to set the maximum height
to which the arm was raised there was still a problem in that the
operating lever had too much travel so that the arm lowered to
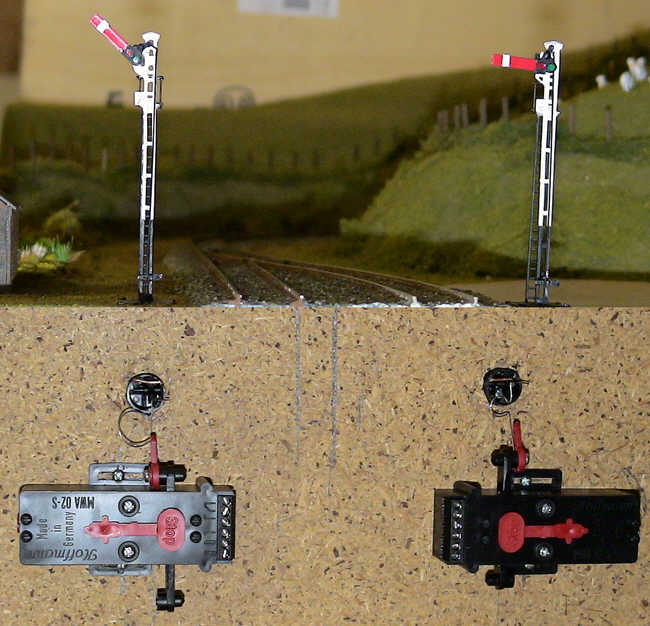
below horizontal. As the signals are to be operated using Hoffman
turnout motors it was necessary to limit this tavel. The simplest
and most effective solution was to glue a piece of copper wire
into a pair of grooves filed into the tube that fits over the
base. One advantage of this solution was that if the grooves
weren't in exactly the right place the wire could be bent to
alter the limit of travel and hence get the arm to stop at
horizontal when lowered.
The Hoffman motors
are simply screwed to the underside of the baseboard with the
movement of the armature aligned to that of the Ratio operating
lever. Fortunately with Wartime there is plenty of space,
although the motor was placed as near the base of the signal as
possible in order to keep the linkage short. The link wire is
just one of the two that come with the Hoffman bent into an
appropriate shape. An Omega loop is fashioned in this to help
absorb the greater travel of the Hoffman armature compared to the
Ratio operating lever. Make this loop as generous as possible
Replacement of Hoffman
motoros with R/C servos
BMRG Library
BMRG Homepage